Skremmebildet av en framtidig, intelligent robot er den menneskelignende kyborgen i Terminator-filmen, som til tross for tap av flere lemmer ikke gir seg i jakten før den blir helt flatklemt i en hydraulisk presse.
Typisk for dagens roboter og andre maskiner er at de er veldig følsomme for defekter. Én liten skade og de slutter å fungere.
– Mens dyr raskt kan tilpasse seg skader, kan ikke dagens roboter tenke utenfor boksen for å finne en kompenserende atferd når de er skadd. De er begrenset til å sine forhåndsdefinerte evner, kan diagnostisere bare forventede feilmoduser og krever en forhåndsprogrammert beredskapsplan for enhver type potensiell skade, noe som er upraktisk for komplekse roboter, skriver en gruppe franske og amerikanske forskere i en artikkel som nylig ble publisert i Nature.


Les også: Kan vi føle omsorg for maskiner?
For langsomt
– En lovende tilnærming for å redusere robot-skjørheten involverer å få roboter til å lære egnet atferd som en respons på skade. Men dagens teknikker er langsomme selv med små, begrensede søkeområder, skriver forskerne.
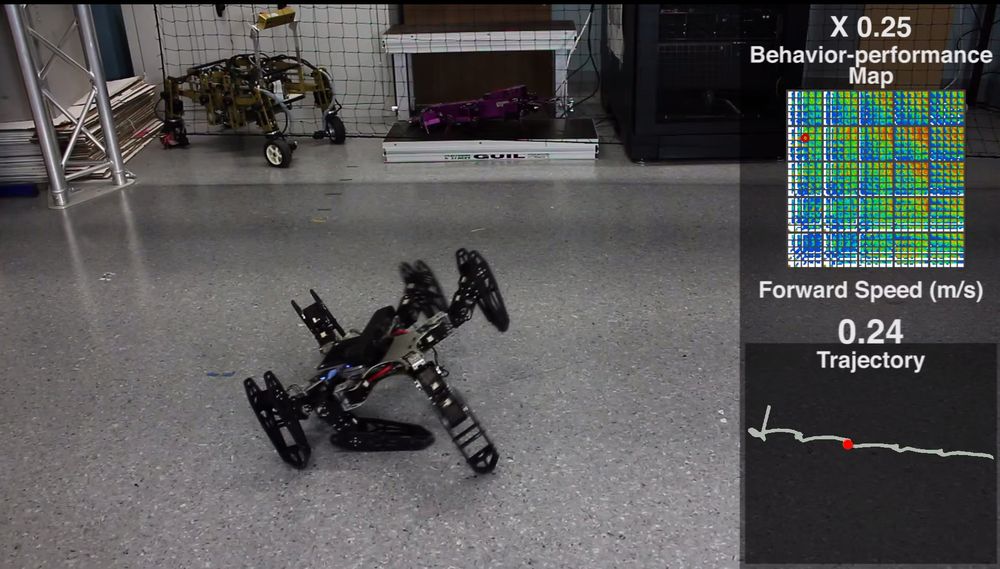
I artikkelen introduserer de derfor en prøve-og-feile-algoritme som lar roboter tilpasse seg skade på mindre enn to minutter, innen omfattende søkeområder, og uten å kreve selvdiagnose eller forhåndsdefinerte beredskapsplaner.
Resultatet kan sees i videoen nedenfor, hvor også metoden forklares i større detalj.
Ikke bare underholdning: Roboten lærer av YouTube
Hobbit
En tilsynelatende mer trivelig robot er Hobbit. Denne har vokst fram i et EU-prosjekt. Det dreier seg om en sosial robot som skal kunne fungere som støtte, selskap og kommunikasjonshjelpemiddel med en alarmfunksjon.
For tiden er Hobbit samboer med 89 år gamle Ella Lundström i Sverige. Dette skriver Lunds Tekniska Högskola i en pressemelding. Mange forskere mener at roboter kan være blant løsningene for å ta hånd om den eldre generasjonen etter hvert som befolkningen øker og vi lever lenger.
Hobbit kan blant annet hjelpe til med praktiske ting som å hente tabletter eller kopp med kaffe, finne briller eller å plukke opp nøklene fra gulvet. Dessuten tar den med jevne mellomrom en patruljeringsrunde og varsler dersom noen skulle ligge på gulvet eller om noe annet avviker fra de vanlige rutinene.

Tanken er ikke at roboten skal erstatte menneskelig kontakt, men kan være et komplement som kan gi brukeren flere muligheter.
Les også: Microsoft voktes av roboter
Hekkeløp med Cheetah 2
Ved MIT Biomimetic Robotics Lab har forskerne utviklet en ny, gepardinspirert robot – Cheetah 2 – som ikke bare er i stand til å galoppere, men også hoppe over opptil 45 cm høye hindrer. Dette er mer enn halvparten av robotens egen høyde, samtidig som at den holder en gjennomsnittsfart på 8 kilometer i timen.


– Et løpehopp er en virkelig dynamisk atferd, sier Sangbae Kim, en førsteamanuensis i maskinteknikk med MIT, i en pressemelding.
– Du er nødt til å kontrollere balanse og energi, samt være i stand til å håndtere sammenstøtet etter landing. Roboten vår er spesielt designet for denne svært dynamiske atferden, sier Kim.
Cheeta 2 har en integrert LIDAR (Light Detection And Ranging), et visuelt system som bruker refleksjoner av laserlys for å kartlegge terrenget. Den bruker en tredelt algoritme til å beregne hoppene og kursen. Alt gjøres i selve roboten.
Selve beregningene gjøres på omtrent 100 millisekunder, omtrent halvparten av tiden den roboten bruker på et skritt.
Under testing på en fire meter lang tredemølle med roboten plassert omtrent midt på, har den hatt omtrent 1 meter med løping på seg til å oppdage hindringen og å planlegge hoppet.
Etter flere testløp viste det seg at roboten klarte omtrent 70 prosent av hindringene. Dersom roboten gis mer tid til å forberede seg på hoppene, forbedres også suksessraten, i alle fall opptil 90 prosent.
Tar og gir: Roboter skal sikre europeiske arbeidsplasser




