
Roboten klarer nemlig å gripe objekter i ulike størrelser og geometri med mye høyere nøyaktighet enn før.
– Ved å trene KI-agenten – altså programvaren – i en virtuell verden, kan den brukes direkte i den virkelige verden, uten tilleggstrening, forteller Sintef-forsker Ekrem Misimi. Han kaller det banebrytende – og forklarer hvorfor:
– En agent er noe som agerer, gjør en handling. Mens en KI-agent er spesialisert programvare som benytter seg av kunstig intelligens for å bli i stand til å oppfatte miljøet sitt, utføre handlinger og lære av erfaringene sine for å oppnå spesifikke mål.


Nytenkende metode
Både hjemme og i industrien finner vi objekter med rare geometriske former, glatte overflater eller som bare kan gripes fra siden. Alle disse variasjonene er utfordrende for en robot som skal gripe noe. Tenk bare på alle utfordringene forskjellige matvarer byr på i form av skjørhet, mykhet og form. Å gripe dem uten å skade eller ødelegge kvaliteten, er en stor utfordring.
I tillegg kommer objektene du må strekke deg etter og kanskje gripe fra siden. Når denne typen objekter i tillegg kommer i alle mulige fasonger og størrelser, er det veldig vanskelig å robotisere oppgaver og operasjoner. Rett og slett fordi roboter frem til nå verken vet hvordan de skal utføre en oppgave med slike objekter eller håndtere nye, ukjente objekter de ikke har sett før.
Det har et forskerteam fra Gentleman-prosjektet, bestående av Sintef og NTNU, funnet ut. Nå lærer de robotene å gripe slike objekter. Samtidig oppdaterer de kontinuerlig griperens posisjon og orientering underveis – altså i sanntid.

– Vi utvikler ny kunnskap og robotbaserte løsninger som skal klare å gripe alle typer objekter, også mat eller andre industriobjekter med utfordrende form. Ved å kombinere robotens tillærte evne til å se gjennom 3D-syn og kunstig intelligens, klarer vi nå å lære robotene disse gripeoperasjonene på en bedre måte, forteller Misimi.
Gjennombrudd i forskning
– En robot uten tilført kunnskap er egentlig dum. Derfor må vi tilføre det den trenger til de oppgavene den skal utføre. Å lære roboten griping og annen avansert manipulasjon av både faste og spesielt deformerbare objekter, er fortsatt ekstremt utfordrende, medgir Misimi.
Men ved å lage et simulert treningsmiljø har de klart å trene roboten på flere scenarioer der den har mulighet til å lære selv og utforske seg frem til den lærer en oppgave på en tilfredsstillende måte.
– Det vanskeligste har vært å få roboten til å lære oppgaven i simulering, samt å overføre kunnskapen fra simuleringsmiljøet til den virkelige verden, forteller doktorgadsstipendiat Sverre Herland.
Det siste er spesielt krevende fordi et objekt ser annerledes ut i den virkelige verden enn i simulering. Derfor er det ingen selvfølge at KI-agenten vil få det til.
KI-teknikken som er brukt, lar agenten lære på egen hånd med minimal veiledning fra mennesker.
– Vi ser også at den er god til å generalisere de tillærte ferdighetene, det vil si å kunne håndtere ukjente objekter som den aldri har sett før, noe som bekreftes av den høye gripenøyaktigheten på slike objekter, forteller forskerne.
Her kan du ta en titt på forskernes eksperiment:
Vil hjelpe europeisk matindustri
Så: Hva kan denne gripeteknologien brukes til? Mange av gripe- og manipulasjonsoppgavene mennesker gjør i matindustrien, er ofte kompliserte, i hvert fall for robotene, og krever øving også for mennesker.

.jpg)
– For at roboten skal kunne utføre slike operasjoner i nærheten av det vi kan med våre egne hender, må ny teknologi som er basert på kunstig intelligens komme på plass, og det er det vi bidrar til med dette prosjektet, sier Misimi.
Han mener robotisering vil være avgjørende for å beholde industrien i Europa og dermed bidra, for eksempel, til en mer bærekraftig matproduksjon, samtidig som den også bidrar til matsikkerhet i en tid hvor behovet for mat øker globalt.
– Teknologien vi utvikler vil blant annet føre til at man ikke lenger trenger å sende mat til andre siden av jordkloden for bearbeiding. Kvaliteten på matvarene blir også bedre når den ikke behøver å fraktes så langt, sier Misimi.
Artikkelen ble først publisert på Gemini.no
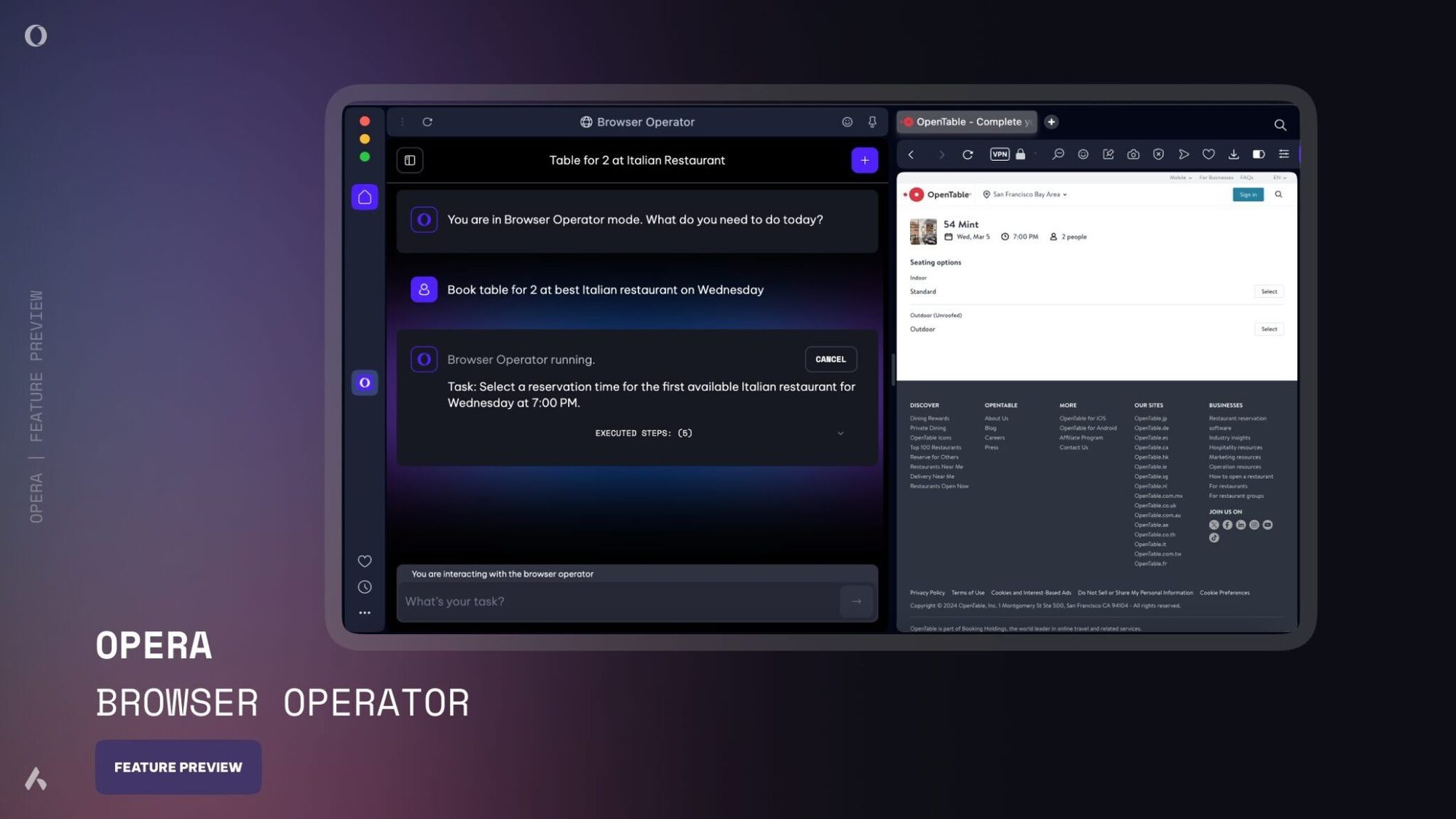
Først ute: Opera-nettleseren får KI-agent som kan surfe på nettet for deg






