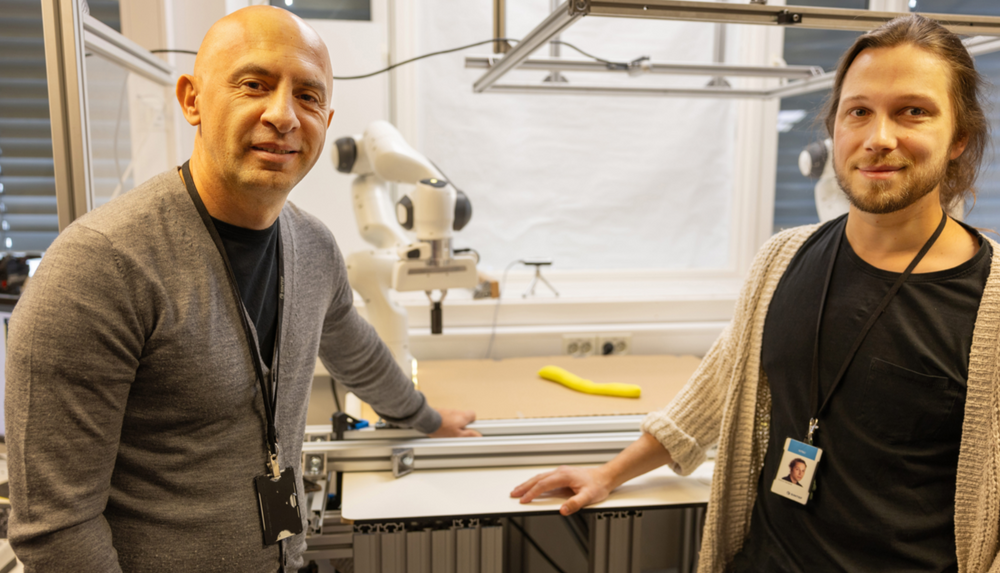
– Til tross for det mange kan ha inntrykk av via mediene, har robotene en lang vei å gå for å kunne håndtere ettergivende objekter, sier Sintef-forsker Ekrem Misimi.
Han mener det er behov for betydelig mer forskning for å få det til.
– Derfor er vi stolte over å ha utviklet en metode som gjør at roboter kan lære seg å forme slike objekter. Dette er banebrytende forskning med et stort innovasjonspotensial, sier Misimi.
KI-basert metode
Utviklingen har skjedd i regi av prosjektet Bifrost – et navn som betyr bro i norrøn mytologi. Men inspirasjonen til den nye metoden er hentet fra kjøkkenbenken. Nærmere bestemt en torskefilet som skal preppes før den skal bli til en middag.
– Vi er vant til å gjør dette uten å tenke så mye. Men hvis du tenker etter, så utfører man flere ulike operasjoner på fileten. Robotene kunne ikke dette før, ettersom de så langt bare har trent på å gripe stive objekter som ikke kan bøyes. I tillegg er det utfordrende å få roboten til å utføre nye oppgaver den ikke har trent på, forteller Misimi.
Innenfor kunstig intelligens (KI) er det den såkalte generaliseringsevnen som roboter sliter med, men som mennesker er så flinke til. For å lykkes har forskerne utviklet en ny metode basert på kunstig intelligens. De lærer opp roboten ved å utføre nærliggende oppgaver til det den skal gjennomføre i virkeligheten – forståelig nok ikke med torskeloins til å begynne med.
Tidkrevende oppgaver vanskeligst
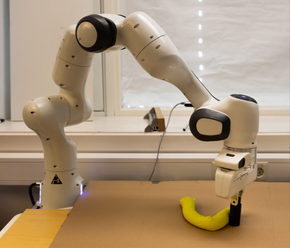
På bordet ligger en lang tøypose fylt med ris som skal etterligne fiskebiten. Den er formet som en I, men på forskernes kommando endrer roboten objektets fasong til en C.
– Vi har altså lykkes med å få roboten til å forme et ettergivende 3D-objekt på kommando. Det virker kanskje ikke så imponerende, men dette er faktisk en fasong roboten ikke har trent på før, påpeker Misimi.
Han legger til at det er enkelt for mennesker å holde på med en oppgave i lang tid, til man får det til, men for en robot er dette mye mer utfordrende.
– Den bruker lengre tid på å lære seg oppgaven jo mer kompleks den er. Jo lengre tid det tar, dess mer utfordrende blir det for roboten.
KI åpner for helt nye muligheter
Forskerteamet har nylig publisert en artikkel om metoden på den ledende internasjonale robotkonferansen, ICRA. Forskerne bak studien forteller at KI-basert robotmanipulasjon byr på muligheter man ikke kunne forestille seg før.
– Det som er kult med denne metoden, er at roboten er trent utelukkende i simulering.
Deretter er kunnskapen overført til den virkelige verden, uten tilleggstrening. Dette er helt nytt. Forskernes hovedfokus har vært å lære robotene egenskaper inspirert av det mennesker kan.
– Vi gjør dem på en måte mer i stand til å utføre oppgaver som krever menneskelig behendighet, og som i dag gjøres utelukkende av mennesker. Både i forhold til læring og persepsjon, sier Misimi.
Med persepsjon menes evnen til å oppfatte det som skjer rundt, slik at man kan planlegge en oppgave og utføre den. En slik kombinasjon av læring og persepsjon er helt nødvendig for å få til slike manipulasjonsoppgaver.


Flere handlinger på rad er vanskelig
Når en robot skal forme et objekt, må den kombinere evnen til å se med å oppfatte.
– Her må den i tillegg jobbe lenge for å få til en oppgave. For at objektet skal få en ny fasong, må roboten bruke flere handlinger for å komme i mål. Det har hittil vært utfordrende å bruke roboter på denne måten, sier Misimi.
Han forteller at roboten gjerne trenger 20 til 60 sekunder på å gi objektet den nye fasongen, avhengig av hvor kompleks den er.
– Det er utfordrende å få roboten til å holde fokus lenge, men vi har lyktes, forteller Sintef-forskeren.
Egnet for matindustrien
Teknologien som utvikles, kan være nyttig til mange ting på tvers av flere industrier.
– Men først og fremst i mat- og sjømatindustrien, der det finnes mange slike ettergivende objekter. Dette er viktig fordi det kan bidra til å gjøre det mulig å beholde matproduksjonen i Norge. På den måten kan det også føre til mer bærekraftig og kortreist mat av bedre kvalitet, forteller Misimi – og legger til:
– På et enda høyere nivå kan kunnskapen fra dette prosjektet bidra til å løse grunnleggende utfordringer i dagens robotikk. Det vil igjen føre til utvikling av ny teknologi, til nytte for både industrier og samfunnet generelt.
Forskerne har også klart å videreutvikle Bifrost-roboten slik at den nå bruker dyttehandlinger i stedet for grep, det er enda mer skånsomt mot følsomme objekter og strukturer.
Artikkelen ble først publisert på Gemini.no

Open AI: Slipper KI-agent som kan surfe på nettet for deg







