På Harvard University forskes det på selvorganiserende systemer, i gruppen Self-organizing Systems Research Group. Et av prosjektene til denne gruppen, døpt Termes, undersøker hvordan små roboter kan brukes til å lage ting langt større enn dem selv.
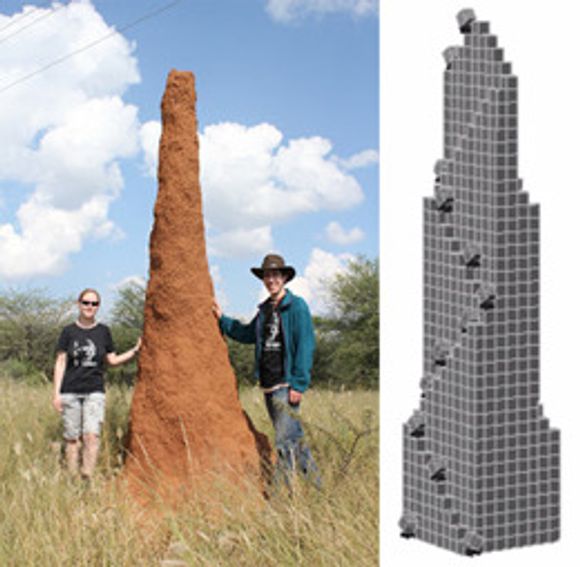
Termes-prosjektet er inspirert av termitter: Forskerne, med Justin Werfel og Radhika Nagpal i spissen, har undret seg over hvordan svermer av små vesener kan samarbeide om å bygge tuer på opptil flere meters høyde, med tilsynelatende godt organiserte ganger, innvendige rom og avkjølende ventilasjon.
På sin hjemmeside skriver Werfel:
– Disse sosiale insektene er et fantastisk bevis på at (forholdsvis) enkle agenter, gjennom uavhengig adferd og uten tilgang til annet enn lokal informasjon, kan bygge storslagne ting.
Derav problemstilling til Termes-prosjektet:
– Hvordan kan vi bygge og programmere robotsvermer, altså kunstige termittkolonier, til å bygge ting for oss? Vi vil at det skal være mulig å gi en slik robotsverm en høynivåbeskrivelse av hva slags bygg man ønsker seg, og være garantert at systemet følger opp, uten at det er nødvendig å gi en detaljert beskrivelse av hvordan det skal gjøres.
Gruppen har holdt på i mange år. Fredag publiserte tidsskriftet Science en oppsummering av gruppens arbeid, Designing Collective Behavior in a Termite-Inspired Robot Construction Team.
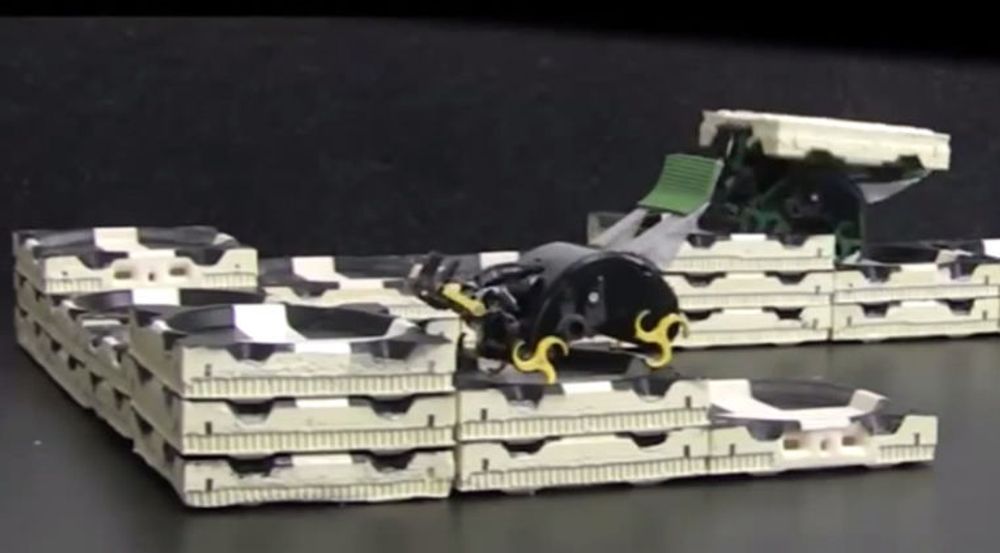
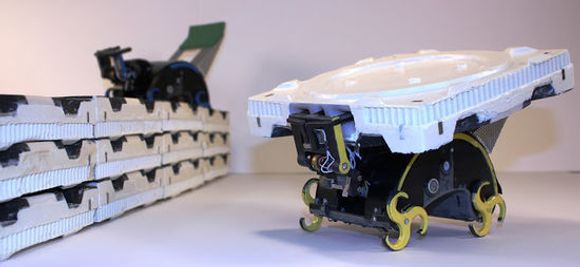
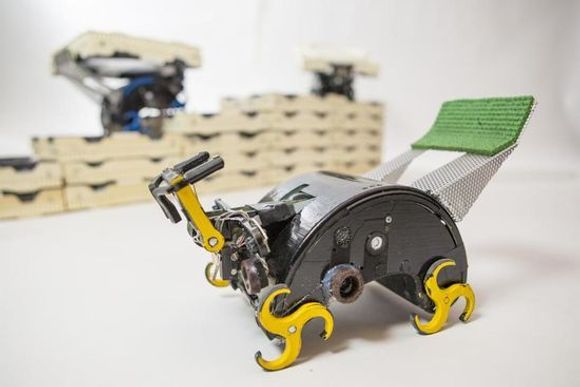
Artikkelen beskriver et system gruppen har konstruert, der små roboter bygger lager byggverk av magnetiske brikker. Robotene og brikkene er formet slik at en robot kan hente en brikke, frakte den til byggeplassen og legge den på bakken eller på en annen brikke. Om nødvendig kan en robot klatre opp på en allerede lagt brikke for å legge sin brikke på plass.
Når en brikke er lagt, går roboten tilbake til brikkelageret, henter en ny, og legger den til konstruksjonen på byggeplassen.
Det ønskede bygget reiser seg etter hvert. Det er ingen kommunikasjon robotene i mellom. Etter en initial programmering av robotene, er det heller ingen kommunikasjon mellom robotene og en sentral. Hver robot styres av det samme programmet, i praksis en liste med adferdsregler. Byggingen starter når robotene får «se» at den første brikken er lagt.


Denne første brikken utgjør nullpunktet i det tredimensjonale rommet som robotene har til rådighet for sine bevegelser, der de orienterer seg etter et vanlig koordinatsystem med tre akser. De grunnleggende instruksene i robotenes CPU er av typen «gå fram», «gå bakover», «legg en brikke», «klatre på en brikke» og «klatre ned en brikke».
Adferdsreglene som styrer bruken av disse grunnleggende instruksene, og som overføres til hver robot, er utdata fra et program der inndata er hvordan den ferdige konstruksjonen skal være. Det er algoritmene i dette programmet som utgjør kjernen i forskningen. Det er her man sørger for at robotene oppfører seg i samsvar med et kollektivt mål, samtidig som alle beveger seg uavhengig av hverandre og uten at de kommuniserer seg imellom.
Foreløpig mangler instruksen «fjern en brikke». Det begrenser hva robotsvermen kan bygge, siden ingen av brikkene som utelukkende brukes for la robotene komme tilstrekkelig høyt opp i konstruksjonen, kan fjernes. Det innebærer at alle konstruksjonene ser ut som pyramider eller ziggurater (sammensetninger av avkappede pyramider) med utvendige trapper.
Forskerne forklarer at denne begrensningen ikke er prinsipiell, den følger av robotenes foreløpige fysiske utforming: De er ennå ikke laget med tanke på å fjerne en brikke som allerede er lagt.
Det er med andre ord en stund til bygningsarbeidere kan erstattes av robotsvermer.
Forskerne har lagt ut flere videoer på Youtube.




